 |
eBoard
①⑧⑨
Written for SIA 2017/2018
|
This tutorial is a brief introduction on how to use this headerfile. More...
This tutorial is a brief introduction on how to use this headerfile.
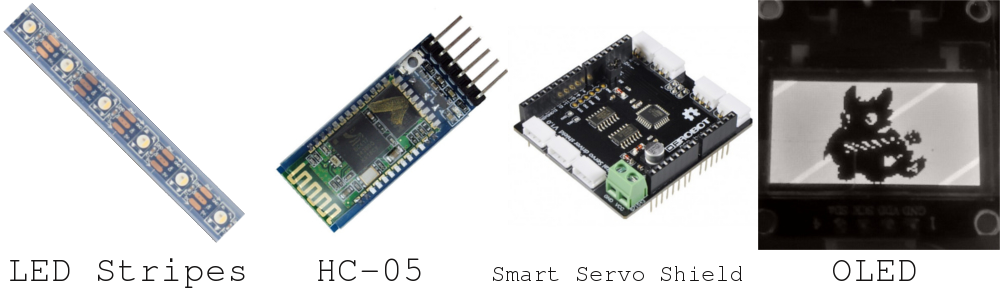
This header is compatible with:
Several functionalities like AX12Servo need special hardware:
This headerfile was created to enable the port of qfixSoccerBoard code to the Arduino platform. Therefore there are a few changes when coding for the arduino:
This is an example code (doing nothing but compile :D) – if you added this as a library
The Header eBoard.h contains all the classes, features etc.
As you need just some of those features you're able to control them with macros.
A macro is defined like this:
They have to be defined before the include line of this header to have any effect!
E.g. to disable the Debug Mode (which will save around 1kb of progmem) you'll have to write:
A list of all Macros can be found at Macros and Constants ;)
The most code snippet in here will include them aswell =)
Furthermore you can use this macros to change some behaviour like the execution speed of rept_task:
This will have the effect that REPT_TASK gets called 5 times a second as long as interrupts are enabled!
Without any special macro defined there are four classes available:
All of them can be disabled via
Overall there are 3 additional classes:
This is the main class and grants access to the digital IO pins etc. The basic usage is shown in this code:
The SoccerBoard-class will take care about pinModes etc. If the assignment fails you may look on the pins set by eBoard: Macros > Pins
To Control the driving and steering motor(s) you can use either the
{SoccerBoard}.motor(...) shortcut:
Or you can use the SoccerBoard-Way:
If you've set the EBOARD_NANO macro to 0x1 there will be two methods available:

